


自营GRP5000 隧道扫描系统
逛了又逛
-
 CX-2B 成像亮度计
CX-2B 成像亮度计
¥电议 -
 照度检测器
照度检测器
¥电议 -
 一氧化碳/一氧化氮能见度检测器
一氧化碳/一氧化氮能见度检测器
¥电议

隧道扫描系统
GRP5000 集成手推式轨检小车和高速激光扫描测量技术。当小车在轨道上行走时,高速旋转的激光扫描仪发射的激光以螺旋线的形式对隧道表面进行全断面扫描,通过分析发射和接收 到激光信号(强度和相位差),可以获得隧道衬砌的内表面影像图以及隧道衬砌表面各点距轨道中心线的距离,可进行表面病害检测、限界检测、隧道变形测量及椭圆度、横径收敛值、错台量分析。

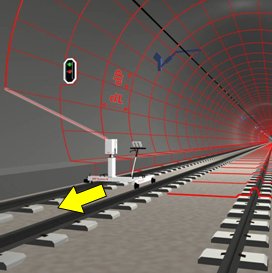
GRP5000隧道扫描系统 螺旋线全断面扫描 原始数据采集
表面病害检测
扫描据处理并沿隧道拱顶展开后,便可得到数字化灰度图。该灰度图清晰度很高,可分辩接触网等设备以及宽度0.3mm以上的裂缝等病害,也可导入TunnelMap隧道数字化管理系统作为病害检测与管理的依据。


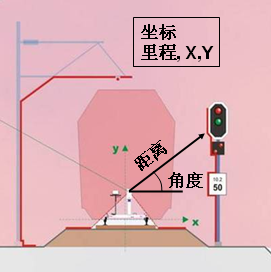
净空测量
可提取某一里程处的隧道断面,然后与实现输入车辆限界或设备限界进行比对,自动生成相对于轨道当前位置的限界分析图;如果已经生成数字化灰度图,也可自动在灰度图中标名侵限区域。


盾构隧道变形及椭圆度分析
按指定的间隔提取隧道断面,先进行数据过滤后(滤掉杂点),然后进行椭圆度分析及横径收敛值的计算。给维修管理部门提供决策依据,为隧道全寿命周期管理提供数据基础。
硬件 | |||||
隧道表面激光扫描装置 | Amberg Profiler 6012 高速相位式激光扫描仪 | ||||
扫描频率 | 200Hz,多级可选 | ||||
扫描样本数 | 2500/5000/10000/20000 测点/圈 | ||||
隧道表面成像测量速度 | 3.6/1.8km/h | ||||
隧道限界测量速度 | <5km/h (分辨率 20mm*20mm ) | ||||
成像效率
| 扫描速度 | 0.35m/s(1.26km/h) | 0.5m/s(1.8km/h) | 1m/s(3.6km/h) | |
图像分辨率 | 3.5mm*3.5mm(100hz) | 5mm*5mm(100hz) | 5mm*5mm(200hz) | ||
测距范围 | 1-119m(激光载波相移测量原理) | ||||
限界测量精度 | ±5mm(相对于5米半径测距) | ||||
断面拟合精度 | ±3mm(相对于2.75米半径测距) | ||||
轨距 | 1000,1067,1435,1520/24,1600,1668/76 | ||||
轨距传感器量程 | -25mm/+65mm(接触式位移传感器) | ||||
测量精度 | ±0.3mm | ||||
水平/超高 | 高精度倾角传感器 | ||||
超高传感器量程 | ±10°(±225mm相对1435mm标准轨距) | ||||
超高传感器精度 | ±0.5mm(动态,相对1435mm标准轨距) | ||||
系统重量 | 59kg | ||||
专用软件 | |||||
Amberg Rail | 工程定义,数据准备/隧道几何尺寸校正,数据分析(影响成果显示和输出,限界测量成果显示和输出) | ||||
商品评价
 449717568
449717568- 手机多多

- 官方微信订阅号

发表评论